SCIL::FLOW< Graph > Class Template Reference
The symbolic constraint for flows. More...
#include <flow.h>
Inheritance diagram for SCIL::FLOW< Graph >:
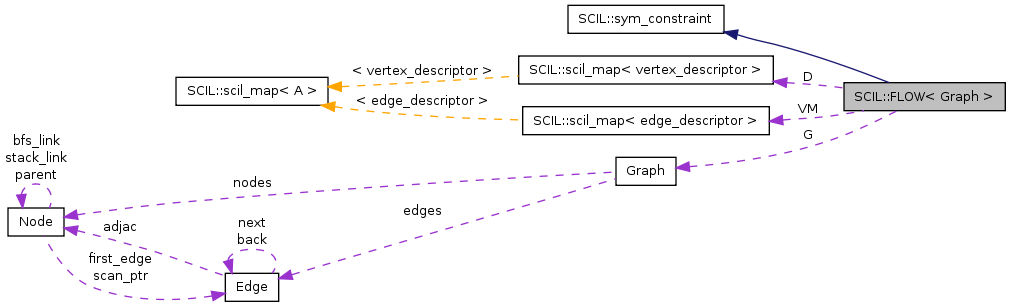
Collaboration diagram for SCIL::FLOW< Graph >:
Classes | |
| class | flow_balance |
Public Member Functions | |
| FLOW (Graph &, scil_map< vertex_descriptor > &, scil_map< edge_descriptor > &) | |
| void | init (subproblem &S) |
| void | info () |
Detailed Description
template<typename Graph>
class SCIL::FLOW< Graph >
This symbolic constraint takes as agruments a directed graph G, a scil_map<node> D and a scil_map<edge> F.
The feasible assignments of the symbolic constraint are those where the flow conservation constraints are satisfied, i.e.  .
.
The symbolic constraint just adds the flow conservation constraints permanentely to the LP.
Definition at line 29 of file flow.h.
Constructor & Destructor Documentation
template<typename Graph >
| SCIL::FLOW< Graph >::FLOW | ( | Graph & | G_, | |
| scil_map< vertex_descriptor > & | D_, | |||
| scil_map< edge_descriptor > & | VM_ | |||
| ) | [inline] |
Ensures that the edges in X form a superset of a path from u to v.
Preconditions:
- The variables associated to the edges are binary. Parameters:
- FLOW_Debug_Out true|false
For a demo, see: production.c
Member Function Documentation
template<typename Graph >
| void SCIL::FLOW< Graph >::info | ( | ) | [inline, virtual] |
Returns information on the symbolic constraints.
Reimplemented from SCIL::sym_constraint.
template<typename Graph >
| void SCIL::FLOW< Graph >::init | ( | subproblem & | S | ) | [inline, virtual] |
Adds the flow conservation constraints to the LP.
Reimplemented from SCIL::sym_constraint.
The documentation for this class was generated from the following file:
