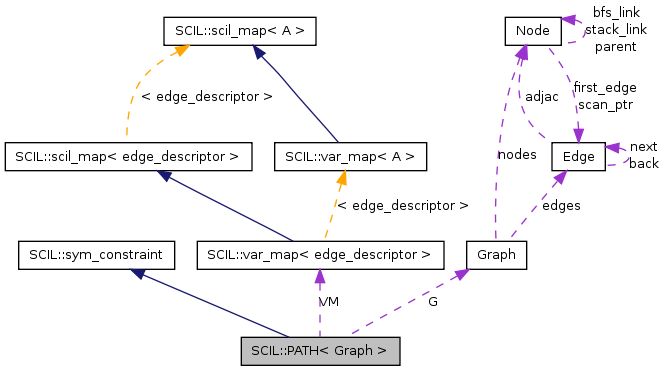
SCIL::PATH< Graph > Class Template Reference
The symbolic constraint for supersets of path. More...
#include <path.h>
Classes | |
| class | path_cutset_inequality |
Public Member Functions | |
| PATH (Graph &G, vertex u, vertex v, var_map< edge_descriptor > &X) | |
| status | standard_separation (subproblem &S) |
| status | feasible (solution &S) |
| void | info () |
Detailed Description
template<typename Graph>
class SCIL::PATH< Graph >
This symbolic constraints takes as agruments a directed graph G, a source node u, a target node v and a var_map<edge> X. X has to map every edge of the graph to a binary variable.
The feasible assignments of the symbolic constraint are those where the vector of the variables associated with the edges of the graph is an incidencevector of a subgraph of G where there is a path from u to v.
The symbolic constraint uses the cutting plane method.
- Examples:
Definition at line 33 of file path.h.
Constructor & Destructor Documentation
Member Function Documentation
Tests if there is a path from u to v.
Reimplemented from SCIL::sym_constraint.
Definition at line 163 of file path.cc.
References SCIL::subproblem::configuration(), and SCIL::solution::value().
| void PATH::info | ( | ) | [inline, virtual] |
Returns information on the symbolic constraints.
Reimplemented from SCIL::sym_constraint.
| PATH< Graph >::status PATH::standard_separation | ( | subproblem & | S | ) | [inline, virtual] |
Separates the constraints  for all
for all  .
.
Reimplemented from SCIL::sym_constraint.
The documentation for this class was generated from the following files:
